Back to Projects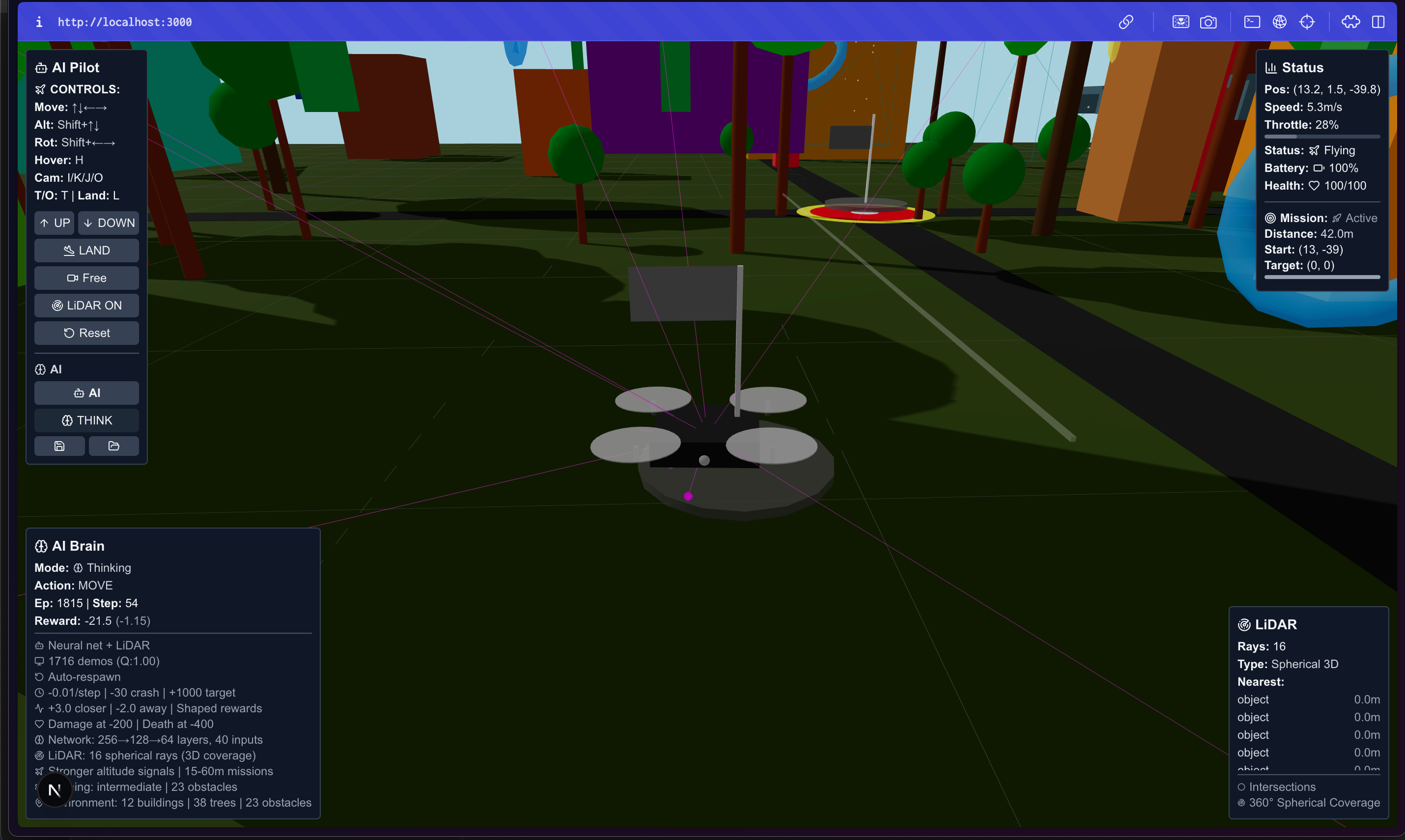

Autonomous LiDaR Drone
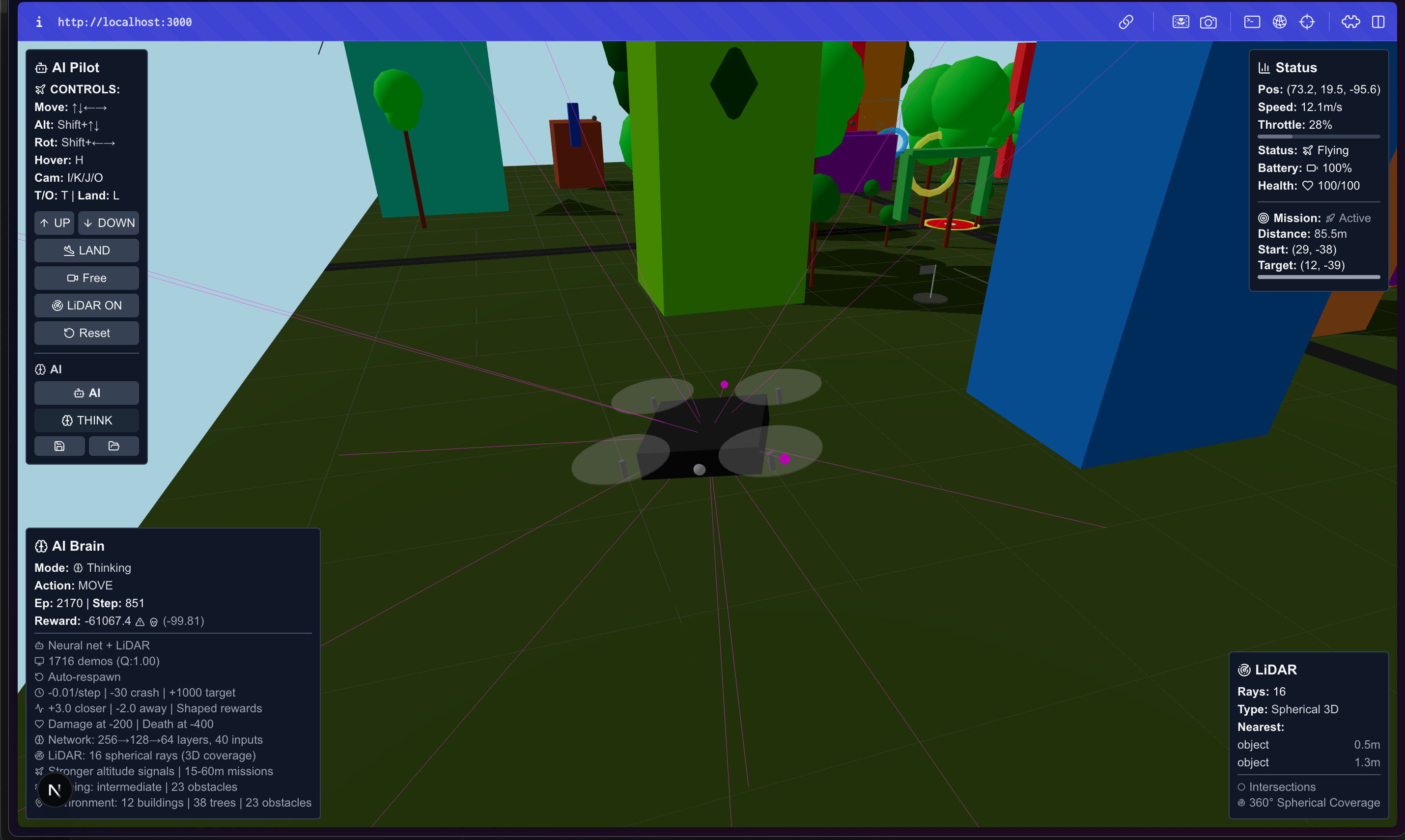
A 3D autonomous drone simulation with AI-powered flight capabilities using deep reinforcement learning. Features realistic physics, LiDAR obstacle detection, and a neural network that learns to navigate complex environments through both reinforcement learning and imitation learning from human demonstrations.
A 3D drone simulation built with Next.js, Three.js, and React Three Fiber, featuring AI-powered autonomous flight using deep reinforcement learning. It includes realistic physics, dynamic environments, and a LiDAR-based sensing system for navigation and obstacle avoidance.
Features
- Physics: 6-DOF drone movement with realistic tilt, thrust, and inertia.
- Controls: Manual keyboard inputs for flight and camera; AI toggle for autonomous mode.
- Environment: Cities, forests, and obstacles with dynamic missions.
- AI: Q-learning and imitation learning with real-time training and shaped rewards.
- LiDAR: 16-ray 360° obstacle detection, optimized for performance.
- Missions: Navigation, precision landing, and obstacle avoidance with configurable difficulty.
Architecture
- Frontend: Next.js 15, React 19, TypeScript
- Styling: Tailwind CSS 4
- AI: Custom neural network with Q-learning, experience replay, and imitation
- learning
- Input: 40 features (position, velocity, LiDAR, mission data)
- Network: 256→128→64 layers, 9 action outputs
- Optimizations: 16-ray LiDAR (down from 52, 68% performance gain), 40-feature input for faster training
More Screenshots